

Mitsubishi PLC를 처음 배우실 때 가장 먼저 만나게 되는 명령 중 하나가 바로 Mitsubishi PLC MOV프로그램입니다. MOV는 말 그대로 데이터를 “옮기는” 역할을 하는 기본 명령어인데요, 센서 값, 설정 값, 파라미터, 표시용 데이터 등 거의 모든 숫자 처리의 출발점이 되기 때문에 MOV를 이해하지 못하면 이후 응용 프로그램에서 막히는 구간이 꼭 한 번씩 찾아옵니다.
특히 GX Works2, GX Works3 환경에서는 래더 다이어그램으로 프로그램을 작성하면서 MOV 블록을 매우 자주 사용하게 됩니다. 따라서 Mitsubishi PLC MOV프로그램의 개념과 사용법을 정확히 정리해 두면, 타이머·카운터·비교 명령·연산 명령을 사용할 때도 훨씬 수월하게 프로그램을 구성하실 수 있습니다.
MOV 명령의 기본 개념 정리
Mitsubishi PLC MOV프로그램에서 사용하는 MOV 명령의 기본 개념은 간단합니다.
- 원본 데이터(소스, Source)를 읽어서
- 목적지(디스티네이션, Destination)에 그대로 복사하는 동작입니다.
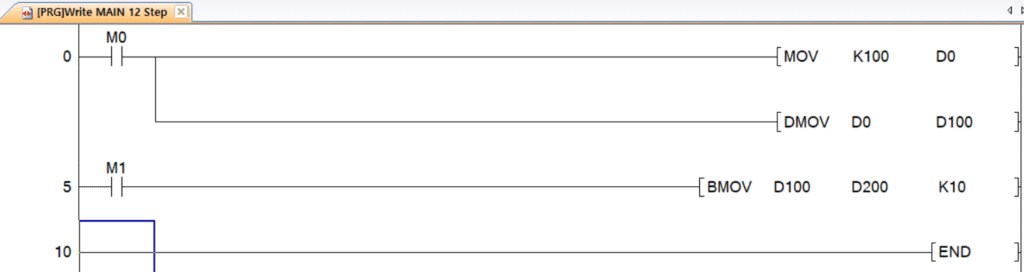
예를 들어, MOV K10 D0 라는 명령은 상수값 10(K10)을 데이터 레지스터 D0에 넣어주는 명령입니다. 이때 K는 10진수 상수를 의미하고, D0는 레지스터 주소입니다. 프로그램이 스캔될 때 조건이 만족되면, MOV 명령이 실행되면서 D0 안에 있는 기존 값은 무시되고 새로 10이 저장됩니다.

정리하면,
- MOV = “값을 옮긴다(복사한다)”
- 원본은 그대로 유지되고
- 목적지에 같은 값이 저장되는 구조입니다.
이 개념만 확실히 잡고 가면, Mitsubishi PLC MOV프로그램에서 어떤 주소를 써야 할지, 어디로 데이터를 보내야 할지 훨씬 명확해집니다.
MOV 명령의 기본 형식과 주소 표기
Mitsubishi PLC MOV프로그램에서 MOV 명령은 보통 다음과 같은 형식으로 사용합니다.
MOV S D- S(Source) : 원본 데이터(상수, 데이터 레지스터, 특수 레지스터 등)
- D(Destination) : 목적지 데이터 레지스터

대표적인 예시는 다음과 같습니다.
MOV K100 D0: 상수 100을 D0에 저장MOV D0 D10: D0에 있는 값을 D10으로 복사
실무에서는 대부분 D 레지스터 간의 이동이 가장 많이 사용됩니다. 예를 들어, 레시피 기능을 만들 때는 레시피 번호에 따라 여러 개의 설정값을 다른 레지스터로 이동시키는 작업을 반복하게 되는데, 이때 Mitsubishi PLC MOV프로그램을 이용해 “기준값 → 실제 사용값” 형태로 데이터를 복사합니다.
또 하나 중요한 포인트는 워드 단위인지, 더블 워드(32비트)인지를 구분하는 것입니다. 기본 MOV는 워드(16비트) 단위 이동이고, 32비트 데이터(예: 속도 명령, 위치 명령 등)를 다룰 때는 DMOV 같은 더블 워드용 명령을 함께 검토하셔야 합니다. 이 부분은 뒤에서 한 번 더 설명드리겠습니다.
간단한 실무 예제 : 설정값을 레지스터로 이동하기
이제 Mitsubishi PLC MOV프로그램을 실제 현장에서 자주 사용하는 상황으로 예를 들어보겠습니다. 예를 들어 어떤 장비에서 제품 종류에 따라 속도 설정값이 달라지는 경우를 가정해 보겠습니다.
- 제품 1번 속도 : 500
- 제품 2번 속도 : 800
- 제품 3번 속도 : 1000
이 값을 각각 D100, D101, D102에 저장해 두었다고 할 때, 현재 선택된 제품 번호가 D0에 들어있다고 가정하겠습니다. 가장 단순한 방식은 각 제품 번호에 따라 MOV 명령을 사용하는 것입니다.
예시 구조는 다음과 같습니다.
- 제품 1번 선택 시
D0 = 1일 때 조건 접점 ONMOV D100 D10: 속도 기준값 D100을 실제 속도 레지스터 D10으로 이동
- 제품 2번 선택 시
D0 = 2일 때 조건 접점 ONMOV D101 D10: D101 → D10
- 제품 3번 선택 시
D0 = 3일 때 조건 접점 ONMOV D102 D10: D102 → D10
이렇게 구성하면, 오퍼레이터가 HMI(터치판넬)에서 제품 번호만 바꾸더라도, 해당 제품에 맞는 속도 값이 자동으로 D10으로 복사되면서 인버터나 서보 드라이브로 전달할 수 있습니다. 이처럼 Mitsubishi PLC MOV프로그램은 **“저장해 둔 기준값을 실제 제어에 사용하는 값으로 가져오는 역할”**을 할 때 매우 유용합니다.
MOV 명령을 사용할 때 꼭 체크해야 할 기본 사항
Mitsubishi PLC MOV프로그램을 작성하다 보면, 처음에는 사소한 부분에서 실수가 자주 발생합니다. 대표적인 체크 포인트를 몇 가지 정리해 보겠습니다.
- 목적지 레지스터 중복 사용 여부
- D10에 여러 곳에서 MOV를 걸어두면, 어떤 MOV가 마지막에 실행되느냐에 따라 값이 계속 바뀔 수 있습니다.
- 제어에 직접 연결된 레지스터는 되도록 한 방향으로만 MOV를 걸어주는 것이 좋습니다.
- 데이터 크기(16비트/32비트) 확인
- 서보 위치 명령, 속도 명령처럼 큰 값이 들어오는 경우에는 DMOV, DINT 등 다른 명령과 조합해야 할 때가 있습니다.
- 단순히 MOV만 사용하면 상위 워드가 잘리거나 값이 틀어질 수 있으니, 해당 매뉴얼에서 데이터 크기를 꼭 확인해 주세요.
- 조건 접점(EN 조건) 설계
- MOV 명령은 조건이 ON일 때마다 계속 실행됩니다.
- 단 한 번만 값을 옮기고 싶다면, 자기유지나 상승 에지(1스캔 펄스) 조건을 함께 사용하는 것이 좋습니다.
MOV와 DMOV, BMOV의 차이 이해하기
Mitsubishi PLC MOV프로그램을 조금 더 깊이 이해하시려면, MOV와 함께 자주 등장하는 DMOV, BMOV의 차이도 알아두시는 것이 좋습니다. 기본 MOV만 알고 있어도 단순 제어는 가능하지만, 데이터 크기와 범위를 고려해야 하는 프로젝트에서는 이 차이가 꽤 중요하게 작용합니다.
- MOV (Word 단위 이동)
- 16비트(워드) 데이터 이동
- 예:
MOV K100 D0→ D0에 100 저장 - 보통 일반 설정값, 카운터 값, 간단한 파라미터 이동에 사용
- DMOV (Double Word 이동)
- 32비트(더블 워드) 데이터 이동
- 예:
DMOV D0 D10→ D0~D1(32비트)을 D10~D11로 이동 - 대형 카운터, 위치 데이터, 속도 레퍼런스처럼 값 범위가 큰 경우에 사용
- BMOV (Block MOV, 연속 데이터 이동)
- 연속된 레지스터 여러 개를 한 번에 이동
- 예:
BMOV D100 D200 K10→ D100~D109까지 10개의 데이터를 D200~D209로 복사 - 레시피 전체를 복사하거나, 설정 테이블을 통째로 백업할 때 유용
실무에서 Mitsubishi PLC MOV프로그램을 설계하실 때는, 먼저 “이 데이터가 16비트로 충분한지, 32비트를 써야 하는지”를 체크하시고, 여러 개를 한 번에 이동해야 한다면 MOV 대신 BMOV를 사용하는 것이 훨씬 효율적입니다.
실무에서 자주 사용하는 MOV 응용 패턴
Mitsubishi PLC MOV프로그램을 조금 더 실무적으로 활용하는 패턴을 몇 가지 정리해 보겠습니다. 실제 장비 프로그램을 설계하실 때 그대로 응용하실 수 있는 내용입니다.
- 초기값 세팅용 MOV
- 장비 전원 ON 시, 또는 초기화 버튼 누를 때 여러 레지스터를 기준값으로 리셋하는 용도입니다.
- 예:
MOV K0 D0(카운터 초기화)MOV K500 D10(기본 속도 값 세팅)
- 초기화 루틴을 하나의 서브루틴으로 만들고, 조건 접점 한 번으로 여러 MOV를 실행하면 관리가 편해집니다.
- 레시피/모델 변경용 MOV
- 앞에서 예로 든 것처럼 제품 번호에 따라 기준값을 불러오는 방식입니다.
- 기본 구조는 “레시피 테이블(D100~D199) → 동작용 레지스터(D0~D99)” 형태로 많이 씁니다.
- 레시피 수가 많아지면 BMOV를 사용해 블록 단위로 옮기는 것을 권장드립니다.
- 알람 한글코드, 화면 표시용 데이터 이동
- HMI에 표시할 코드 값을 D 레지스터에 정리하고, 이벤트에 따라 특정 코드 값을 MOV로 옮겨줍니다.
- 예:
MOV K101 D50→ “도어 오픈 알람” 코드 등
- 센서 값을 다른 연산용 레지스터로 분리
- 예를 들어 아날로그 입력 값을 바로 연산에 사용하지 않고, 먼저 MOV로 별도 레지스터에 복사한 뒤 스케일링, 비교 연산을 수행하면 트러블슈팅이 훨씬 편해집니다.
- 이 역시 Mitsubishi PLC MOV프로그램에서 자주 쓰는 안전한 패턴입니다.
GX Works2 / GX Works3에서 MOV 명령 입력 팁
Mitsubishi PLC MOV프로그램을 GX Works2나 GX Works3에서 작성하다 보면, 같은 MOV라도 작성 방식에 따라 가독성이 크게 달라집니다. 가독성이 좋아야 디버깅과 유지보수가 쉬워지기 때문에, 몇 가지 팁을 함께 정리해 보겠습니다.
- 디바이스 코멘트 적극 활용
- D0, D10, D100 같은 주소만 보고는 의미를 알기 어렵습니다.
- 예:
- D0 : 현재 제품 번호
- D10 : 현재 속도 명령값
- D100 : 제품1 속도 기준값
- 이렇게 코멘트를 달아 두면, MOV 명령이 어떤 의미로 쓰였는지 한눈에 파악하실 수 있습니다.
- MOV 명령 블록 묶어서 배치하기
- 초기화 MOV, 레시피 MOV, 알람 코드 MOV 등 목적에 따라 래더 영역을 나누어 배치해 주세요.
- “초기화 영역”, “레시피 처리 영역”처럼 명확히 나눠놓으면, 나중에 프로그램을 보는 사람도 쉽게 이해할 수 있습니다.
- 모니터 화면에서 MOV 대상 레지스터 함께 관찰하기
- 디버깅 시 Source와 Destination을 동시에 모니터링하면, MOV가 제대로 동작하는지 바로 확인할 수 있습니다.
- 예: MOV D100 D10이 있다면, D100과 D10을 동시에 감시창에 올려두고 값 변화를 비교해 보는 식입니다.
이렇게만 관리해도 Mitsubishi PLC MOV프로그램의 품질이 훨씬 올라가고, 협력업체나 동료 엔지니어와 프로그램을 공유할 때도 신뢰를 얻기 쉽습니다.
자주 발생하는 실수와 해결 방법
현장에서 Mitsubishi PLC MOV프로그램을 사용하다 보면 비슷한 실수가 반복되는 경우가 많습니다. 대표적인 예와 해결 방법을 정리해 드리겠습니다.
- 조건 미설정으로 인한 상시 MOV 실행
- 모든 스캔에서 MOV가 계속 실행되면, 다른 연산 결과가 덮어써지는 문제가 생깁니다.
- 해결: “한 번만 실행되는 조건(상승 에지, 초기 스텝 조건 등)”을 사용하거나, 자기유지 구조를 활용해 불필요한 반복 실행을 막아야 합니다.
- 레지스터 겹침 문제
- D0를 다른 곳에서도 사용하고 있는데, 모르고 MOV 목적지로 사용하면서 값이 계속 바뀌는 경우입니다.
- 해결: 주소 계획표(디바이스 맵)을 만들어, 어떤 레지스터가 어떤 용도로 쓰이는지 문서화해 두는 것이 좋습니다.
- 32비트 데이터인데 MOV만 사용한 경우
- 서보 위치 데이터나 누적 카운터 등은 32비트인 경우가 많습니다.
- MOV 대신 DMOV를 사용해야 하는데, 그냥 MOV로 옮기면 값이 잘려서 전혀 다른 숫자가 될 수 있습니다.
- 해결: 사용하는 매뉴얼에서 데이터 타입을 확인하고, 필요하면 DMOV, DINT 등을 함께 사용하시길 권장드립니다.
- BMOV 길이(K값) 설정 오류
- BMOV에서 K값을 잘못 넣어서, 의도보다 더 많은 레지스터를 덮어버리는 사고도 자주 발생합니다.
- 해결: 꼭 “시작 주소 / 끝 주소”를 종이에 적어보고 범위가 맞는지 확인한 뒤 다운로드하는 습관을 들이시면 좋습니다.
Mitsubishi PLC MOV프로그램 자주 묻는 질문(FAQ)
Q1. MOV 명령은 얼마나 자주 사용해도 괜찮나요?
A. 스캔마다 실행되어도 원칙적으로는 문제없지만, 다른 연산이나 외부 통신과 연계되는 레지스터에 과도하게 MOV를 걸어두면 디버깅이 어려워질 수 있습니다. 중요한 레지스터는 “필요할 때만” MOV를 실행하는 구조가 좋습니다.
Q2. MOV 명령만으로도 간단한 계산이 가능한가요?
A. MOV 자체는 계산 기능은 없고, 어디까지나 “데이터 이동”만 담당합니다. 하지만 Mitsubishi PLC MOV프로그램에서 MOV를 사용해 기준값을 옮긴 후, ADD, SUB, MUL, DIV 같은 연산 명령과 조합하면 다양한 계산을 구현하실 수 있습니다.
Q3. 레시피 기능을 만들 때 꼭 BMOV를 써야 하나요?
A. 레시피 수가 적고, 레지스터 개수도 많지 않다면 MOV 여러 개로도 충분히 구현 가능합니다. 다만 모델 수가 많아지고, 한 번에 옮겨야 하는 레지스터가 10개, 20개씩 늘어나면 BMOV를 사용하는 것이 훨씬 깔끔하고 오류도 줄어듭니다.
Q4. 기존 프로그램에 MOV가 너무 많아서 정리가 안 됩니다. 어떻게 접근해야 할까요?
A. 먼저 “역할별 MOV 그룹”을 나누는 것부터 시작해 보시면 좋습니다. 초기화용, 레시피용, 알람용, 통신용 등으로 라벨을 붙이고, 각 그룹별로 코멘트를 정리하면 구조가 보이기 시작합니다. 그 다음에 불필요한 MOV를 제거하거나 BMOV로 묶는 식으로 리팩토링하시면 됩니다.
마무리: Mitsubishi PLC MOV프로그램을 이해하면 나머지가 쉬워집니다
지금까지 Mitsubishi PLC MOV프로그램의 기본 개념, MOV/DMOV/BMOV의 차이, 실무에서 자주 사용하는 패턴, 그리고 자주 발생하는 실수와 FAQ까지 한 번에 정리해 보았습니다. MOV는 겉보기에는 단순한 명령이지만, 실제 현장에서는 모든 데이터 흐름의 출발점이 되는 핵심 기능입니다.
- 초기값 세팅
- 레시피 전환
- 알람 코드 관리
- HMI 표시값 전달
- 아날로그 값 전처리
이 모든 과정에서 결국은 MOV 계열 명령이 중심 역할을 하게 됩니다. 따라서 Mitsubishi PLC를 제대로 이해하고 싶으시다면, 오늘 정리한 내용을 바탕으로 직접 작은 테스트 프로그램을 몇 개 만들어 보시기를 추천드립니다. D 레지스터에 값을 넣어 보고, MOV로 옮겨 보고, 화면에서 모니터링해 보시면 금방 감이 잡히실 것입니다.
TIP! MOV는 PLC 프로그램에서 제일 많이 사용하는 데이터 전송 명령어 입니다.
실제 현장에서 MOV를 이용하여 Step을 나눠 자동화 순서를 정하고 순서대로 장비가 동작할 수 있도록 사용됩니다.
만약 여러분이 MOV를 사용하여 D영역에 어떠한 값을 넣고 사용하였다면 그 동작이 완료된 이후 꼭 D영역을 0번으로 보내거나 다음 번호로 이동해야 해당 Step에서 넘어갈 수 있으며 위 방식대로 넘기지 않았다면 해당 Step에서 넘어가지 못하고 무언정지가 발생할 수 있습니다!!!